Proje Hakkında
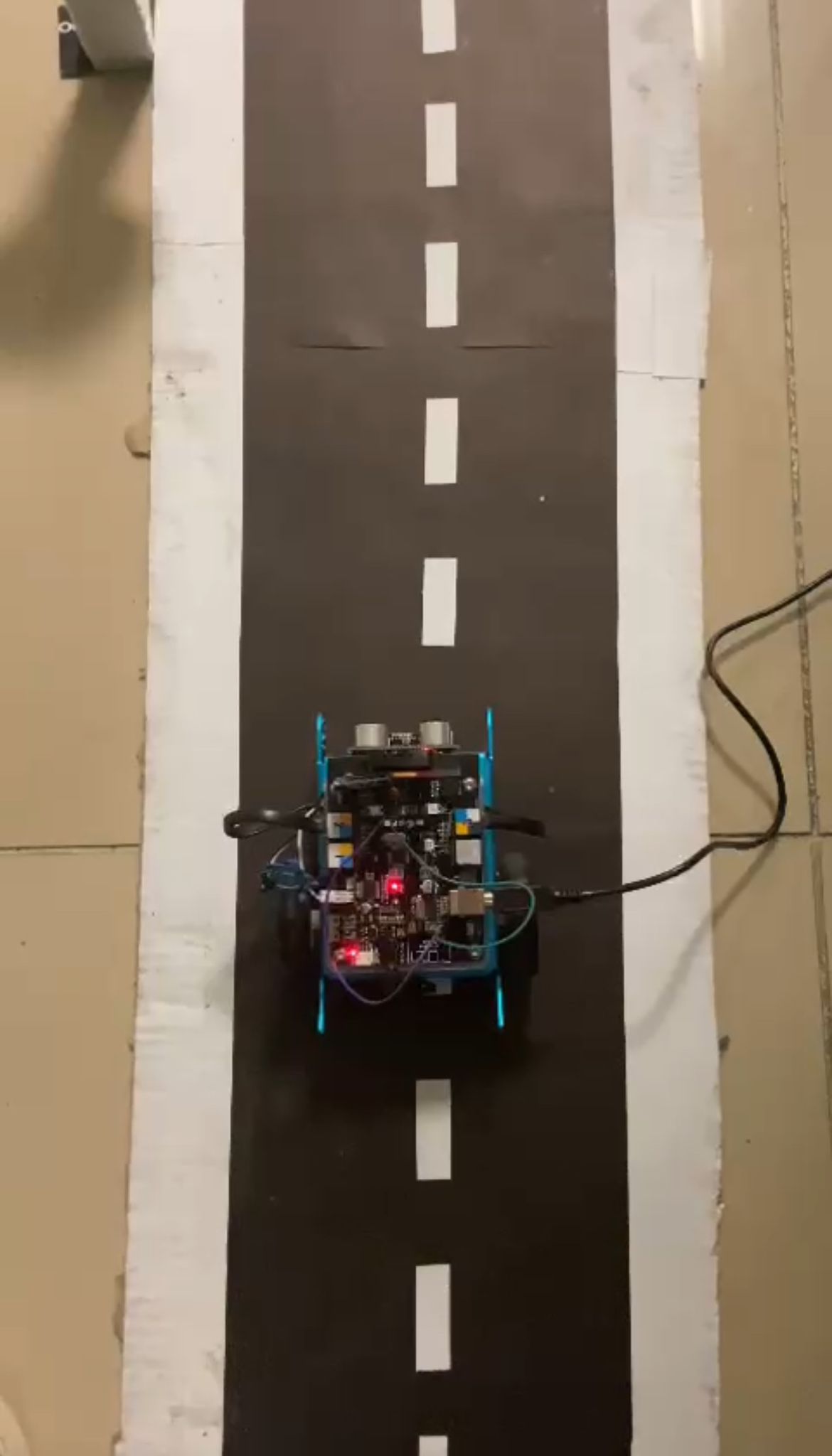
Bu proje kapsamında, dört kişilik ekibimle birlikte OpenCV kütüphanesi ve yapay zeka yaklaşımları kullanılarak matematiksel bir model geliştirdik ve uyguladık. Parkur üzerine dört farklı işaret (Hız 5cm/sn, Hız 10cm/sn, Hız 20cm/sn ve Dur) ekleyerek nesne algılama ve hız limiti tanıma işlemlerini gerçekleştirdik.
Demo sırasında, otonom aracımız hız limitlerini doğru bir şekilde belirleyip 2-3 saniye içinde hızını buna göre ayarladı. Ayrıca araç, yol sınırlarına sadık kalarak 50 cm genişliğindeki yolun içinde kaldı ve her iki taraftaki beyaz çizgileri ihlal etmekten kaçındı.
Kullanılan Teknolojiler
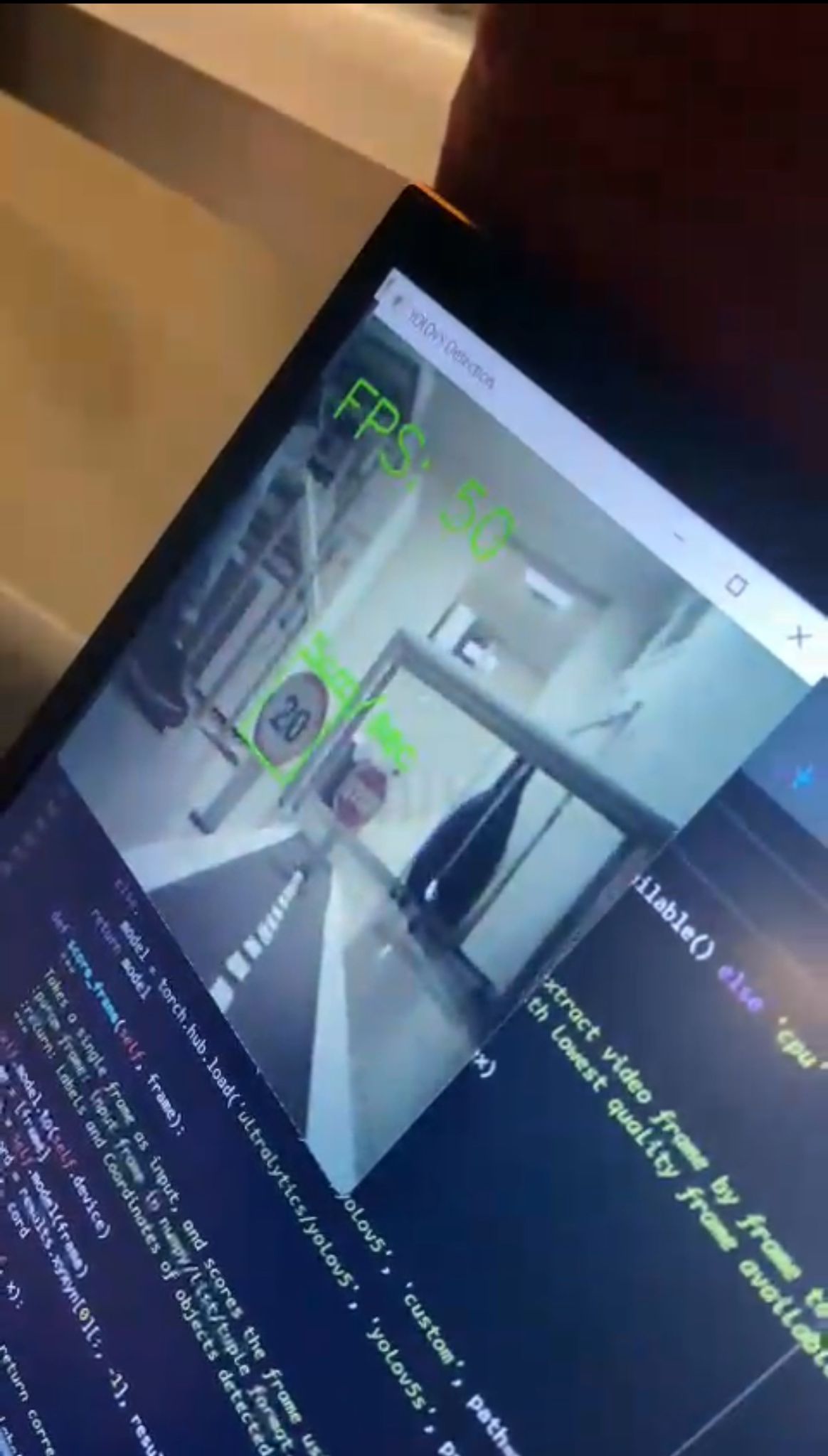
- Kütüphane: Görüntü işleme ve nesne algılama için OpenCV ve YOLOv5
- Mikrodenetleyici: Arduino Uno
- Yazılım Dili: Gömülü sistemler için C++
- Sensörler: Engel algılama için Ultrasonik Sensör
- Motor Sürücü: L298N Çift H-Köprü Motor Sürücü
- Kamera: ESP-32 Kamera Modülü (Daha sonra mobil kamera ile geliştirildi)
Temel Başarılar
- OpenCV kütüphanesi kullanılarak nesne algılama ve hız limiti tanıma başarıyla uygulandı.
- Trafik işaretlerini algıladıktan sonra 2-3 saniye içinde hız doğru bir şekilde ayarlandı.
- Araç, parkur sınırları içinde kalarak şerit takibini başarıyla gerçekleştirdi.
Karşılaşılan Zorluklar ve Çözümler
Başlangıçtaki kamera görüntü kalitesi sorunları, ESP32 kamera yerine mobil telefon kamerası kullanılarak çözüldü. Kodlama hataları ve kablo bağlantı sorunları ise takım çalışması ve test süreçleri ile giderildi.