About the Project
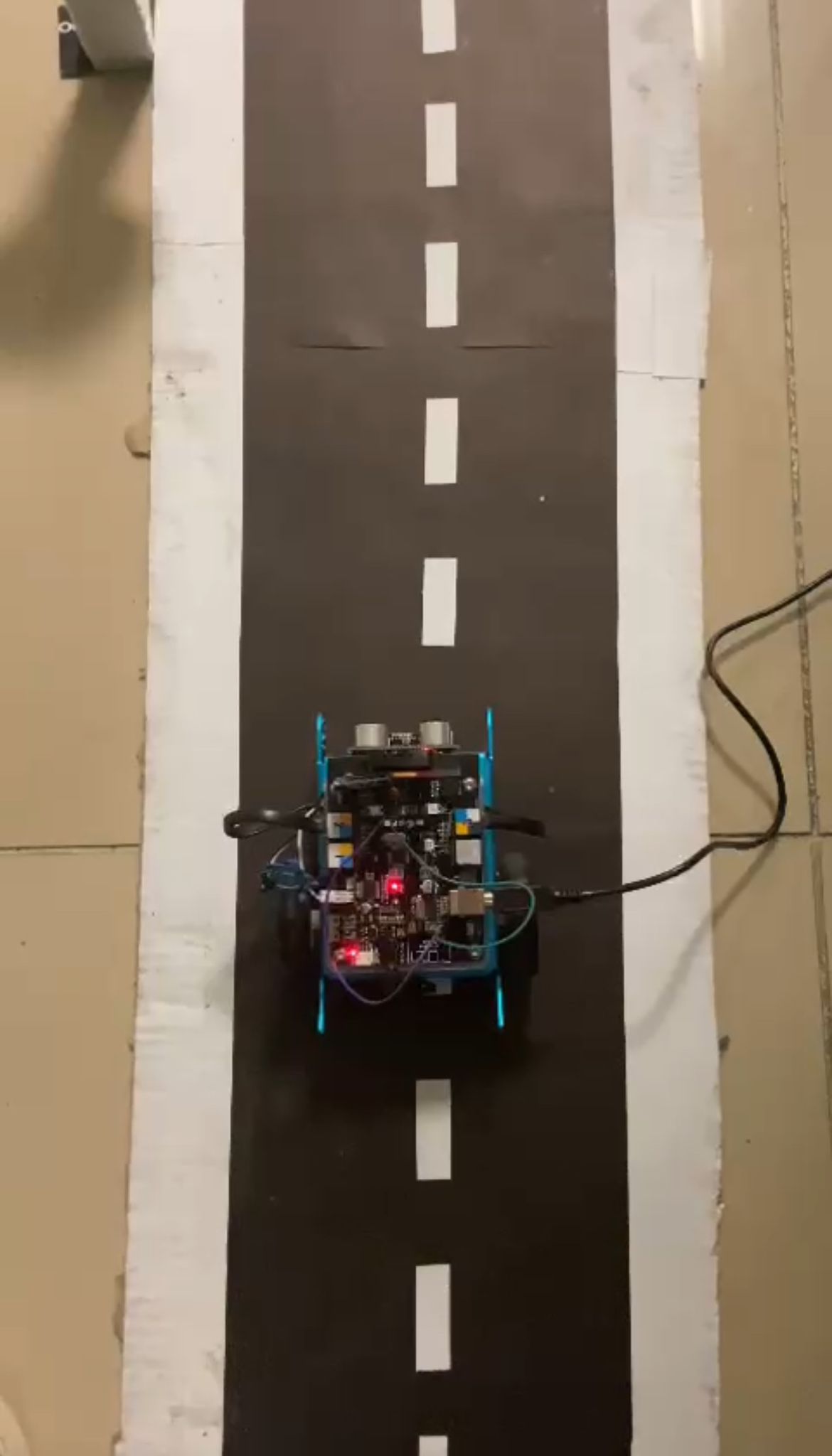
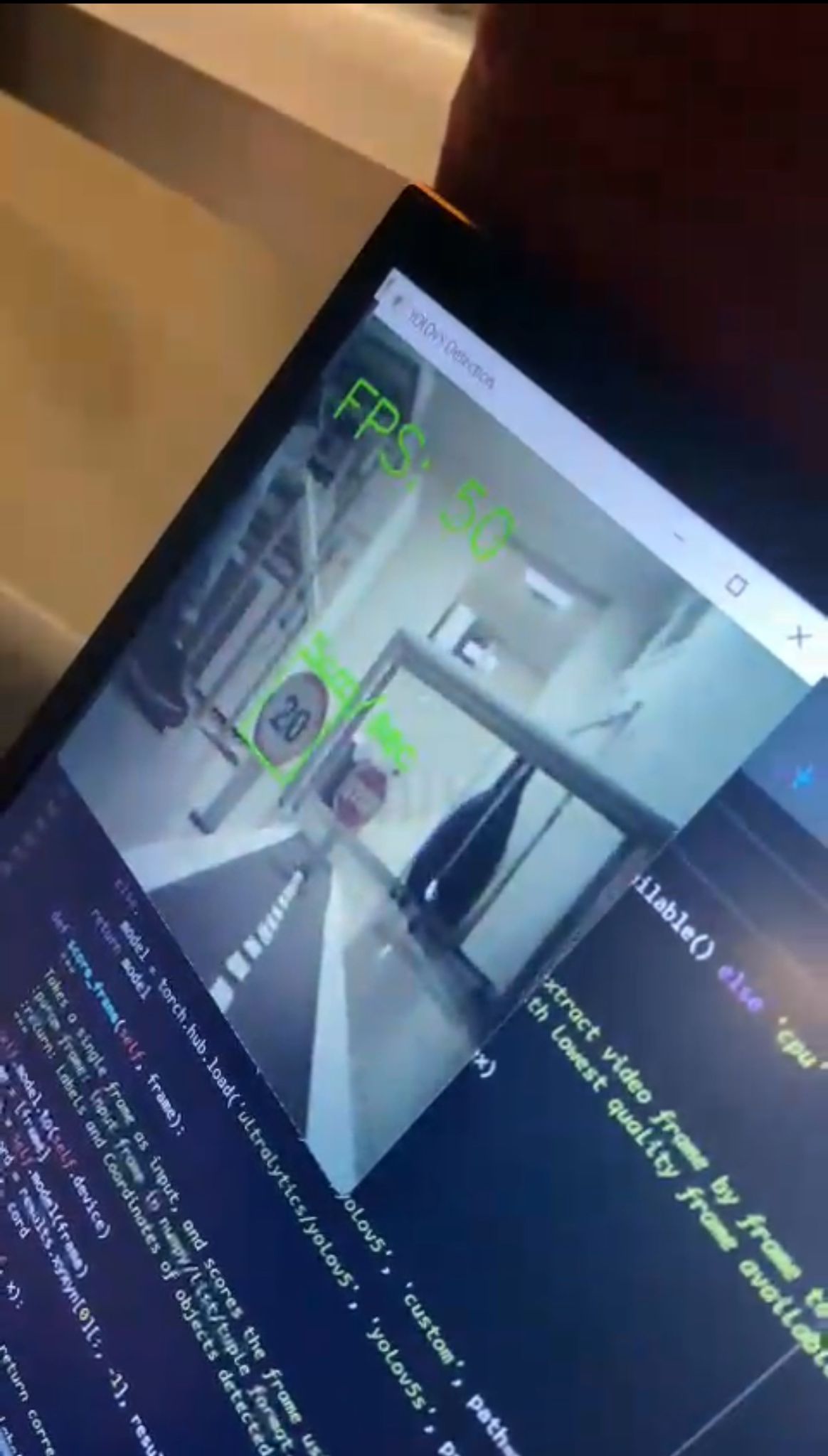
In this project, together with my team of four, we developed and implemented a mathematical model using the OpenCV library and artificial intelligence approaches. We implemented object detection and speed limit recognition by adding four different signs (Speed 5cm/s, Speed 10cm/s, Speed 20cm/s, and Stop) on the track.
During the demo, our autonomous vehicle correctly identified the speed limits and adjusted its speed accordingly within 2-3 seconds. Additionally, the vehicle stayed within the 50 cm wide road adhering to the road boundaries and avoided violating the white lines on both sides.
Technologies Used
- Library: OpenCV and YOLOv5 for image processing and object detection
- Microcontroller: Arduino Uno
- Programming Language: C++ for embedded systems
- Sensors: Ultrasonic Sensor for obstacle detection
- Motor Driver: L298N Dual H-Bridge Motor Driver
- Camera: ESP-32 Camera Module (Later upgraded to mobile camera)
Key Achievements
- Object detection and speed limit recognition successfully implemented using OpenCV library.
- Speed was correctly adjusted within 2-3 seconds after detecting traffic signs.
- The vehicle successfully performed lane tracking by staying within the track boundaries.
Challenges and Solutions
Initial camera image quality issues were resolved by using a mobile phone camera instead of the ESP32 camera. Coding errors and cable connection problems were resolved through teamwork and testing processes.